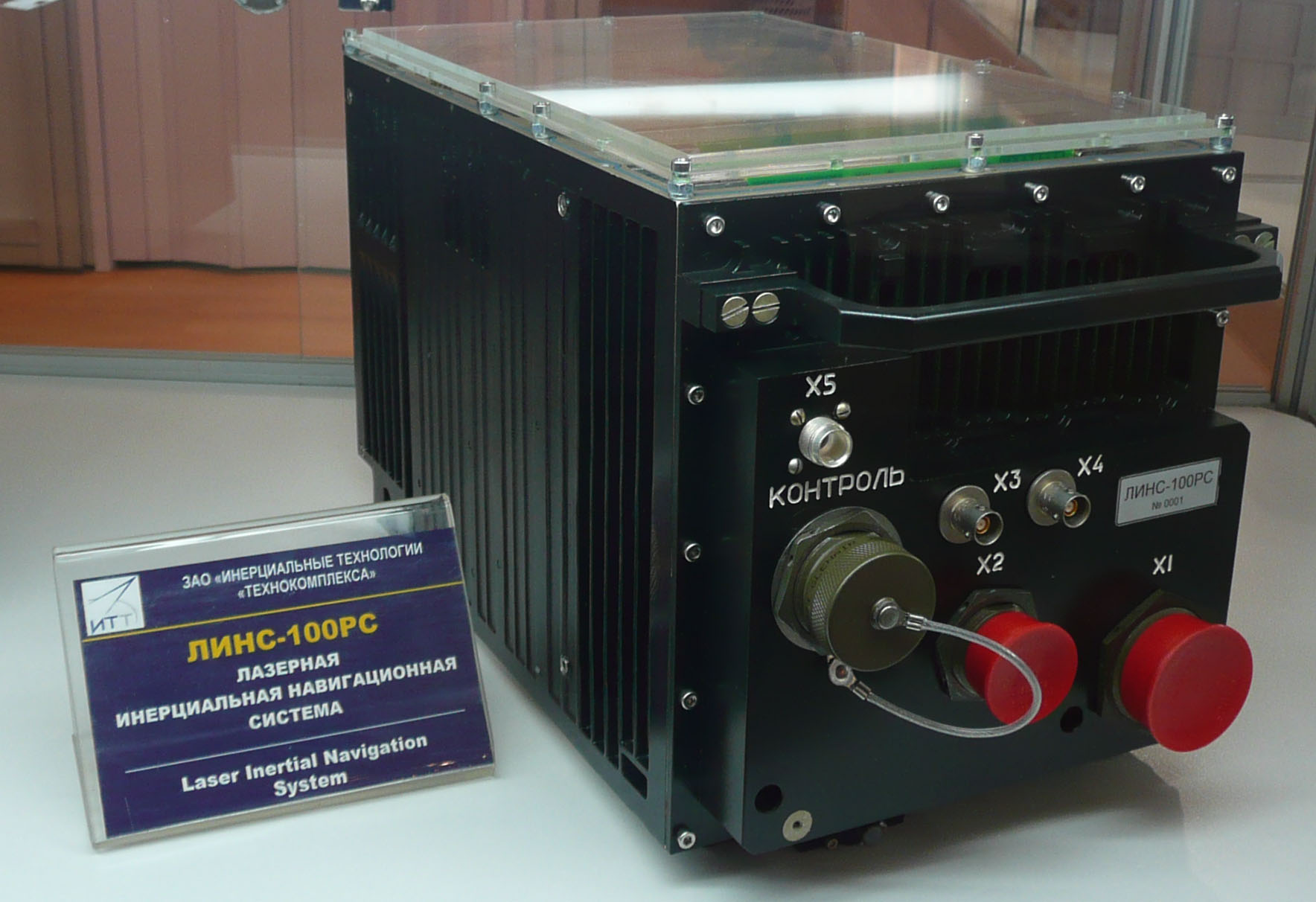
Инерциальная навигационная система, INS Inertial Navigation System Инерциальная навигационная система

GNSS Глобальная навигационная спутниковая система - это космическая система спутников, которые предоставляют информацию о местоположении долгота, широта, высота и информацию о времени при любых погодных условиях в любой точке Земли или вблизи нее на устройства, называемые GNSS-приемниками. Бортовая цифровая вычислительная машина Бортовой комплекс обороны Электронный полётный планшет. На этом сайте используются файлы cookie.
Повышает производительность инерциальных навигационных систем за счет постобработки инерциальных данных с сырыми данными ГНСС. Подобрать аналог Запрос КП. Скрыть архивные товары. Особенности работы систем В зависимости от способа запоминания данных принято делить ИНС на бесплатформенные и платформенные устройства.
В зависимости от конструкции и принципа работы различают следующие типы подобных платформенных систем: аналитическая устроена так, чтобы гироскопические устройства и акселерометры оставались неподвижными, координаты определяются при помощи счётно-решающего устройства; геометрическая имеет две платформы, одна из которых с гироскопом стабильна в инерциальном пространстве, а вторая — относительно горизонта, данные определяются исходя из их взаимного расположения; полуаналитическая интегральная навигационная система работает с непрерывной стабилизацией по местному горизонту, вычислитель для определения координат располагается вне платформы.
Как купить? Лучшие предложения. SBG Apogee Series.
SBG Ellipse Series. SBG Ekinox Series. Нам доверяют.
Преимущества методов инерциальной навигации состоят в автономности, помехозащищённости и возможности полной автоматизации всех процессов навигации. Благодаря этому методы инерциальной навигации получают всё более широкое применение при решении проблем навигации надводных, подводных и воздушных судов, космических судов и аппаратов и других движущихся объектов.
Инерциальная навигация также используется в военных целях: в крылатых ракетах и БПЛА , в случае радиоэлектронного противодействия противника. Как только система навигации крылатой ракеты или БПЛА обнаруживает воздействие средств РЭБ противника, блокировку или искажение сигнала GPS , она запоминает последние координаты и переключается на инерциальную систему навигации [3].
Принципы инерциальной навигации базируются на сформулированных ещё Ньютоном законах механики , которым подчиняется движение тел по отношению к инерциальной системе отсчёта для движений в пределах Солнечной системы — по отношению к звёздам.
Разработка основ инерциальной навигации относится к м годам. Булгаков , А. Ишлинский , Е. Левенталь, Г. Фридлендер , в Германии — М. Шулер нем.

Значительную роль в теоретических основах инерциальной навигации играет теория устойчивости механических систем, большой вклад в которую внесли российские математики А. Ляпунов и А. Практическая реализация методов инерциальной навигации была связана со значительными трудностями, вызываемыми необходимостью обеспечить высокую точность и надёжность работы всех устройств при заданных габаритах и весе.
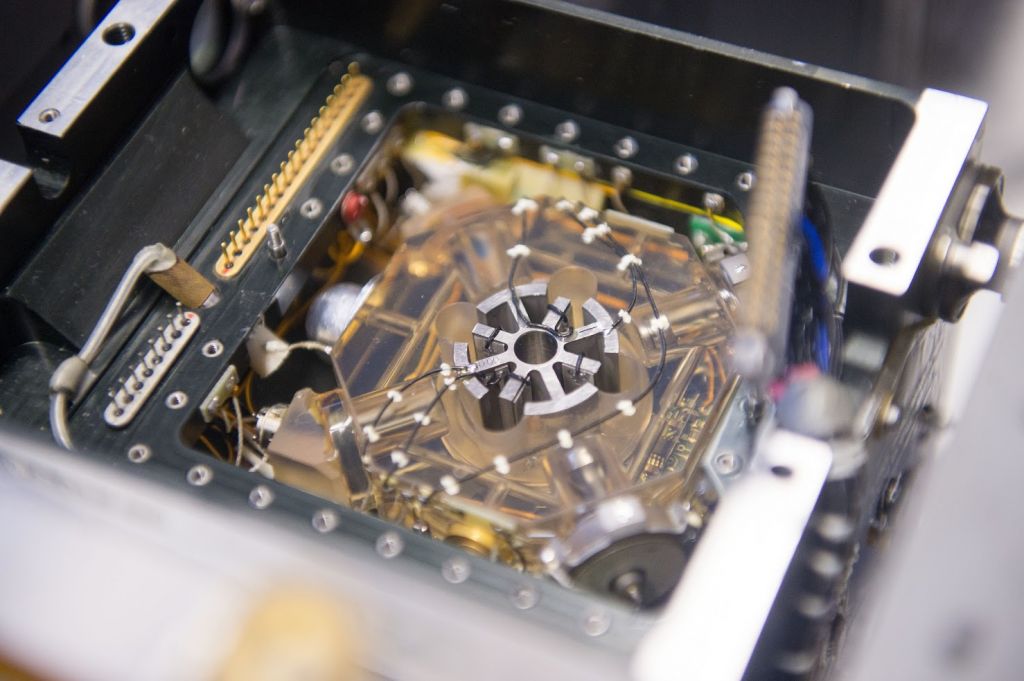
Преодоление этих трудностей становится возможным благодаря созданию специальных технических средств — инерциальных навигационных систем ИНС. Так, аппаратура первой американской ИНС в том числе навигационная ЭВМ конструктивно была выполнена в виде нескольких ящиков внушительных размеров и, занимая почти весь салон самолёта, впервые была испытана во время перелёта в Лос-Анджелес , автоматически ведя самолёт по маршруту. Инерциальные навигационные системы ИНС имеют в своём составе датчики линейного ускорения акселерометры и угловой скорости гироскопы или пары акселерометров, измеряющих центростремительное ускорение.
С их помощью можно определить отклонение связанной с корпусом прибора системы координат от системы координат, связанной с Землёй, получив углы ориентации: рыскание курс , тангаж и крен.
Угловое отклонение координат в виде широты , долготы и высоты определяется путём интегрирования показаний акселерометров. Данные о линейном ускорении, рысканье, тангаже и крене поступают в вычислительное устройство, интегрируются и преобразуются в угловое отклонение координат — долготу, широту и высоту.
В настоящее время бесплатформенные ИНС практически полностью вытеснили платформенные, хотя последние отличаются высокой точностью позиционирования и предстартовой подготовки.
Но они достаточно громоздки, не универсальны, дороги и имеют сложную конструкцию. К сожалению, у БИНС есть серьезная слабость: неограниченное накопление методической ошибки и ошибки, связанной с изначальной калибровкой системы.
Для устранения этого недостатка применяют физические и алгоритмические методы. Но в первом случае БИНС частично теряют преимущества, связанные с простотой конструкции и компактностью: этот метод предполагает помещение системы на гироплатформе, датчики которой используются как для стабилизации приборов, так и для навигации.
Во втором случае частично теряется автономность ИНС, поскольку происходит ее совмещение с другими способами навигации. Такие навигационные системы называются интегрированными. В настоящее время чаще всего происходит совмещение инерциальной навигационной системы и спутниковой. За счет внешнего сигнала в показания приборов вносится поправка, но система не теряет функциональности, когда по каким-либо причинам нет доступа к спутнику.
При разработке навигационных систем инженеры столкнулись с двумя противоположными проблемами: обеспечением точности определения координат и автономности.
Использование спутниковой или радионавигации обеспечивает наибольшую точность позиционирования объекта, но при этом демаскирует его, а при недоступности внешнего сигнала такая система теряет функциональность.